|
My current research focuses on geometry processing using deep learning. Email / CV / Google Scholar / Github / LinkedIn / X / Bluesky |

|
|
|

|
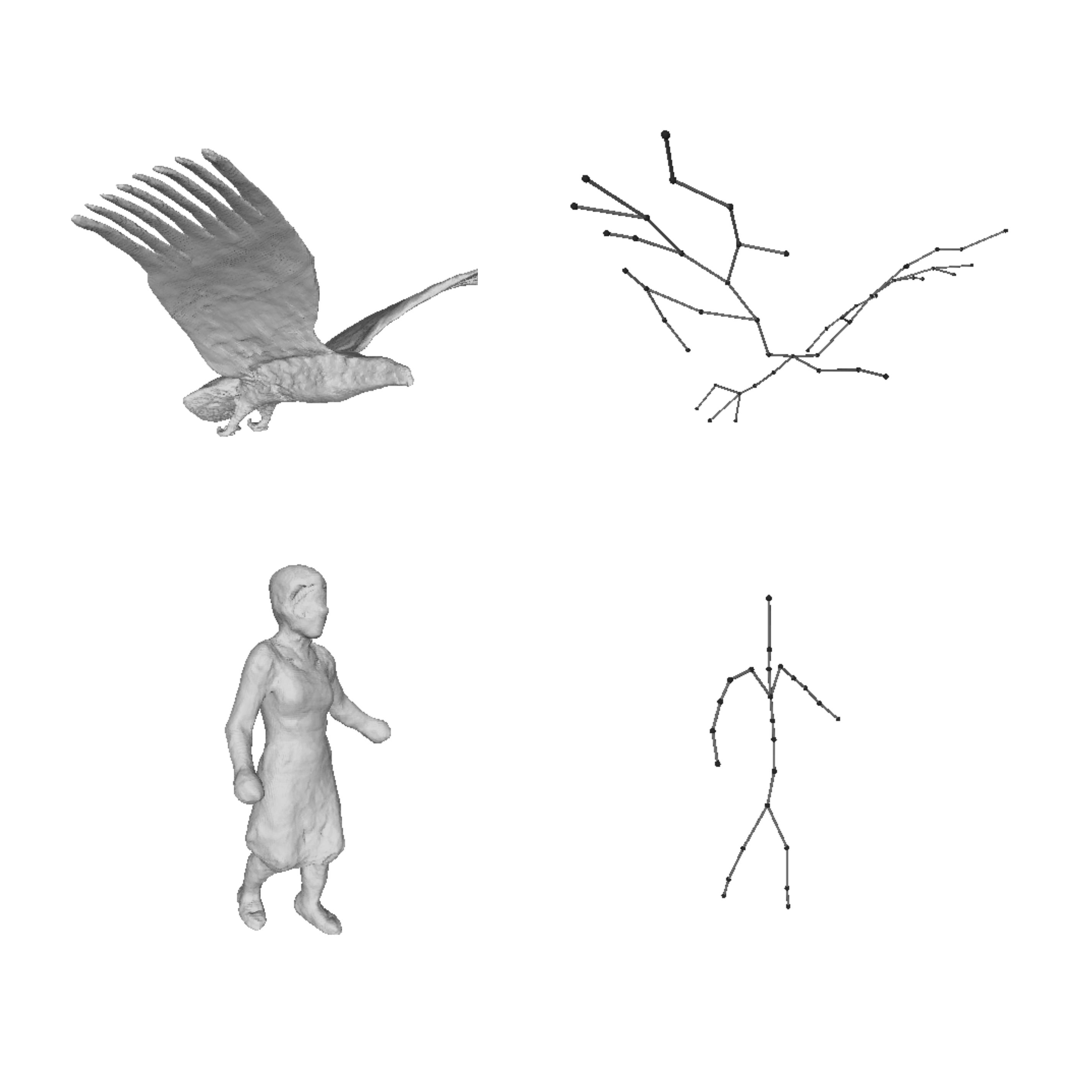
Tianshu Kuai, Arman Maesumi, Daniel Ritchie, Noam Aigerman ACM Transactions on Graphics (SIGGRAPH 2026) project page / arXiv / code / data |
|
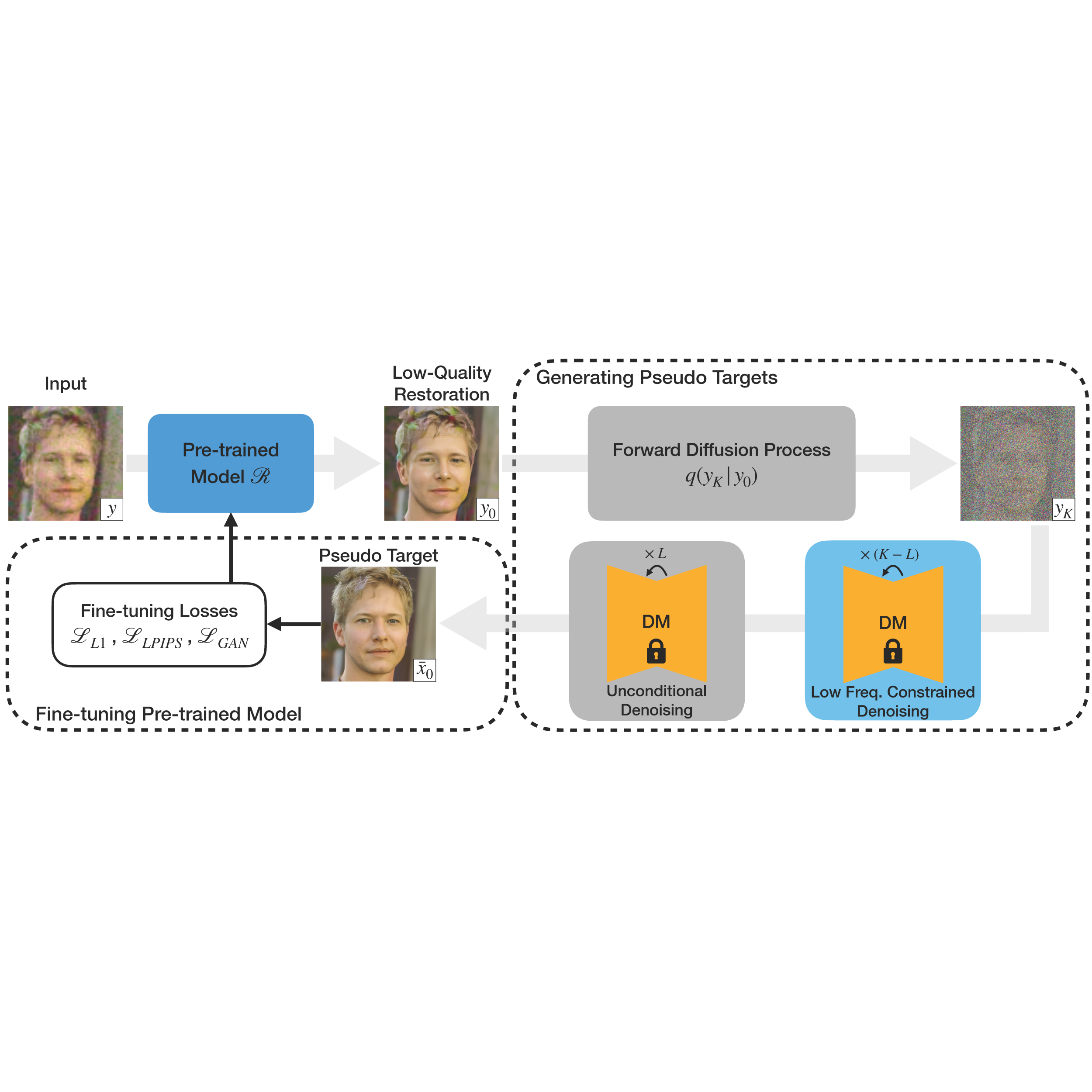
Tianshu Kuai, Sina Honari, Igor Gilitschenski, Alex Levinshtein WACV 2025 (Oral) project page / arXiv / code / data |
|
Tianshu Kuai, Akash Karthikeyan, Yash Kant, Ashkan Mirzaei, Igor Gilitschenski CVPRW 2023 project page / arXiv / code / data |

|
Anas Mahmoud, Jordan S.K. Hu, Tianshu Kuai, Ali Harakeh, Liam Paull, Steven L. Waslander CVPR 2023 arXiv / code |
|
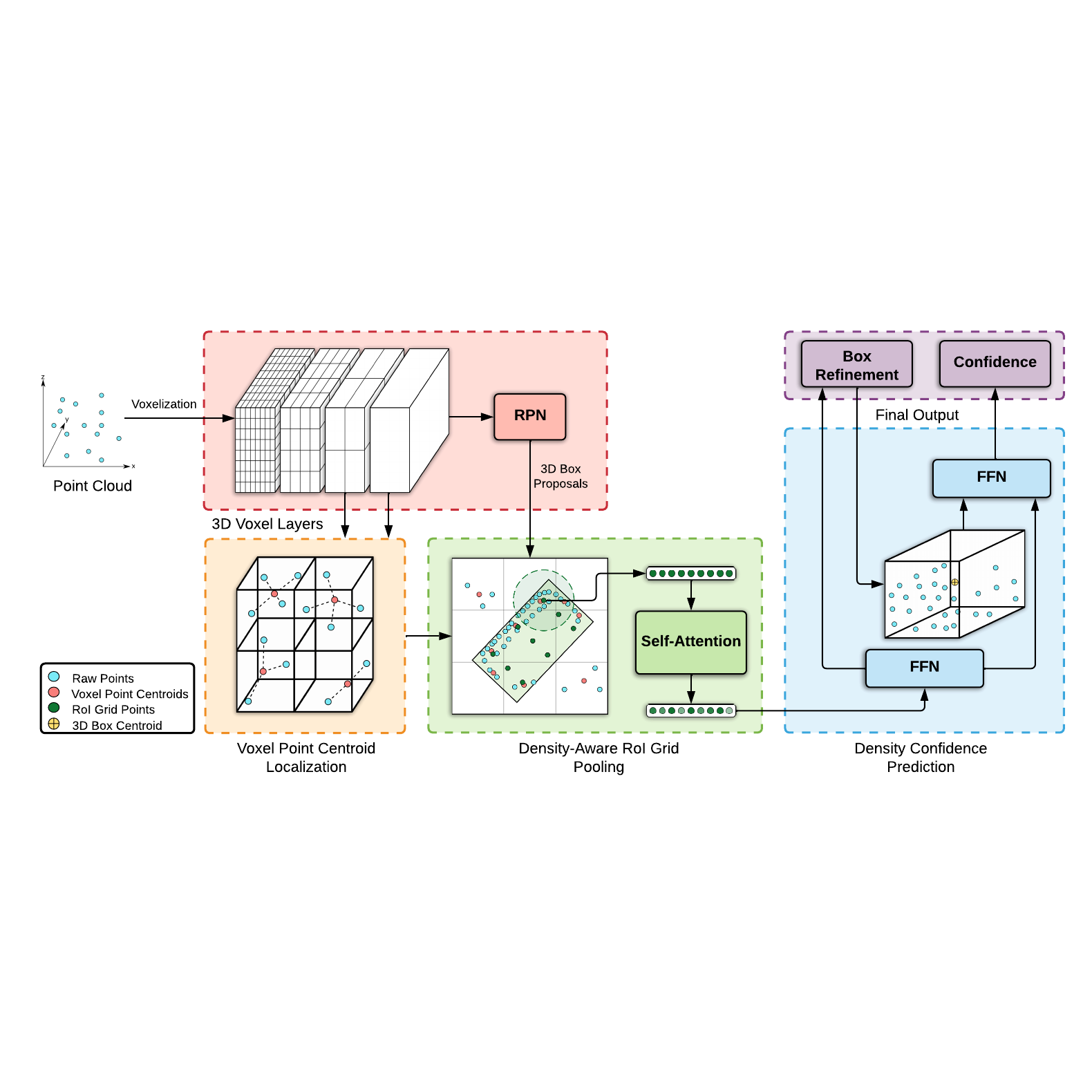
Jordan S.K. Hu, Tianshu Kuai, Steven L. Waslander CVPR 2022 arXiv / code |
|
|
|
|
Samsung AI Center Toronto May 2023 - April 2024 | Toronto, ON |
|
|
Qualcomm May 2020 - May 2021 | Toronto, ON |
|
|
|
|